La fusion de capteurs: elle va améliorer la sécurité des modèles Cadillac
La toute nouvelle XTS 2013 de Cadillac, la voiture de série la plus perfectionnée jamais offerte par la marque de luxe, introduit un système de sécurité active et d'assistance au conducteur, un jalon important vers le développement d'un véhicule sans conducteur.
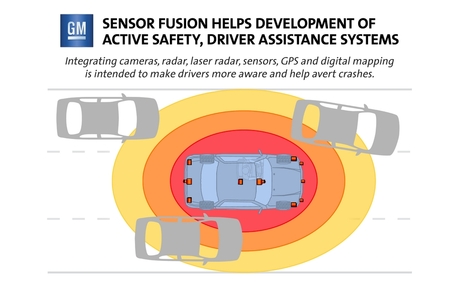
Commercialisé cet automne dans la XTS, le groupe d'assistance au conducteur est le premier système du genre offert par General Motors à utiliser la fusion de capteurs, qui permet l'intégration d'une vaste gamme de technologies de détection et de positionnement pouvant alerter le conducteur des risques routiers et l'aider à éviter une collision.
Le système fait appel à un radar, des caméras et des capteurs à ultrason qui offrent des fonctions de sécurité évoluées, notamment :
- Freinage arrière automatique
- Régulateur de vitesse adaptatif à tous les régimes
- Aide aintelligente au freinage
- Alerte de collision frontale
- Siège à alerte de sécurité
- Système de préparation automatique à une collision
- Avertisseur de sortie de voie
- Système de détection d’obstacles sur les côtés
- Alerte de trafic transversal arrière
- Système de phares avant directionnels adaptatifs
- Caméra de recul avec lignes de guidage dynamiques
- Visualisation tête haute
« Nous croyons que la fusion de capteurs permettra aux futurs systèmes de sécurité active de gérer un nombre croissant d'entrées pour offrir une détection périphérique totale du risque de collision et des fonctions d'assistance au conducteur améliorées, affirme Bakhtiar Litkouhi, chef de groupe du laboratoire de recherche et de développement GM pour les systèmes de détection et de commande de véhicule.
Un système qui combine les atouts de multiples technologies de détection et qui gère de façon experte ces entrées peut offrir des conseils, des avertissements et des interventions pour aider les conducteurs à éviter les collisions et sauver des vies, ».
La fusion de capteurs sert également de composante de base au développement de véhicules semi-autonomes et entièrement autonomes, qui sont conçus pour maintenir leur position dans la voie et s'adapter à la circulation. On prévoit que des technologies plus sophistiquées pour les véhicules sans conducteur, qui pourraient permettre une conduite semi-autonome et entièrement autonome, seront disponible vers la fin de la décennie.
Les travaux de pointe de GM sur la fusion de capteurs mettent à profit son expérience avec Le Boss, un Tahoe de Chevrolet entièrement autonome conçu par GM, l’Université Carnegie Mellon et d'autres sociétés partenaires, et nommé en l'honneur du fondateur de la recherche et du développement GM, Charles F. « Boss » Kettering. En 2007, Le « Boss » a parcouru une distance de 100 km (60 milles) en moins de six heures malgré le trafic urbain, les intersections achalandées et les signalisations d'arrêt et a gagné la compétition Urban Challenge 2007 organisée par DARPA (Defense Advanced Research Projects Agency), l'agence américaine en charge des projets en recherche avancée pour la Défense.
Le développement de la fusion de capteurs est également appuyé par le travail de GM sur les trois prototypes de véhicules électriques semi-autonomes EN-V dévoilés à l’Exposition universelle 2010 de Shanghai. En combinant le système de positionnement global (GPS) aux technologies de communication entre véhicules et de détection de distance, le prototype EN-V peut rouler avec l’aide du conducteur ou tout seul, en choisissant automatiquement l’itinéraire le plus rapide en fonction d’une information routière en temps réel.
Au nombre des technologies que GM songe à développer pour les futurs systèmes de sécurité active se trouve LIDAR, une technologie de détection de la lumière qui peut mesurer la distance entre le véhicule et un objet en l'éclairant, souvent en utilisant les impulsions d'un laser. Bien que la technologie LIDAR ne puisse pas remplacer la vision du conducteur, elle peut devenir une autre paire d'yeux lorsque la visibilité se détériore en raison de conditions météorologiques défavorables ou la nuit. Lorsque combinée à un radar, des caméras et des capteurs à ultrason, LIDAR peut permettre d'éviter des collisions.
Un système de positionnement plus perfectionné, qui utilise une cartographie numérique et un GPS plus précis, devrait également jouer un rôle important dans les futurs systèmes de sécurité active puisqu'il aide à localiser les véhicules par rapport aux autres. Bien que l'efficacité du GPS puisse être limitée en milieu urbain où les gratte-ciel peuvent interférer avec les signaux satellites, la technologie est toujours considérée comme un atout lorsqu'alliée à d'autres technologies de détection et de positionnement.
« Aucun capteur travaillant seul ne peut fournir toute l'information nécessaire. C'est pourquoi plusieurs capteurs et technologies de positionnement doivent travailler de concert avec synergie et subtilité, déclare Litkouhi. C'est ce que permettra la fusion de capteurs. »
Source: General Motors